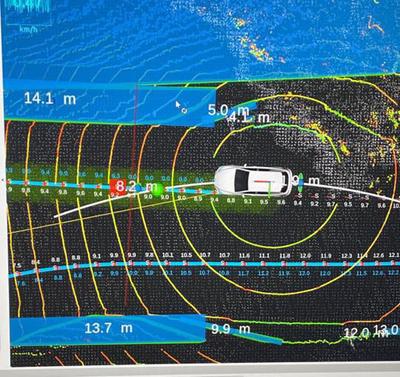
Vehicle Perception Illustration
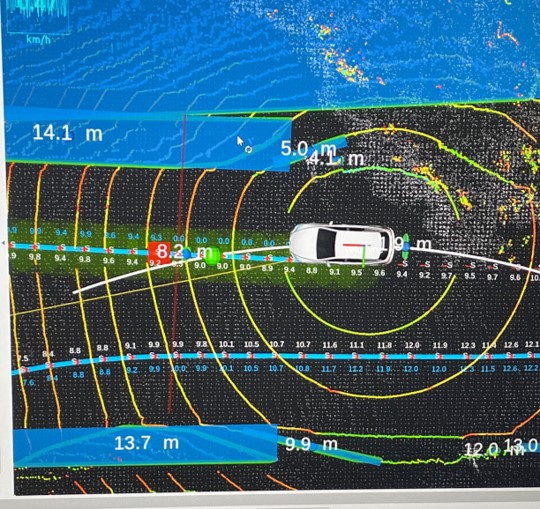
Three types of perception methods were adopted by the CAV owned by CATS lab, USF, such as Lidar-based method, Radar-based method, and Camera-based method. As illustrated as follows.


Xiaowei (Tom) Shi
Assistant Professor
My research interests include connected, automated, modular, electric vehicle technologies.