Piecewise PID Control
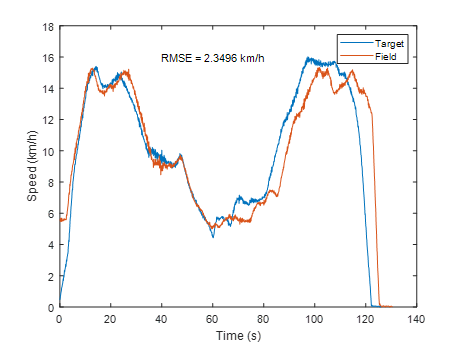
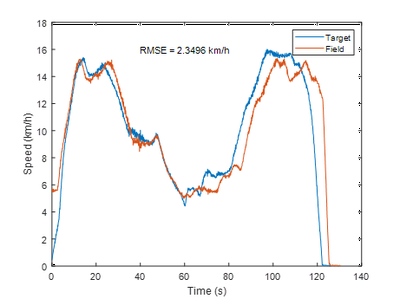
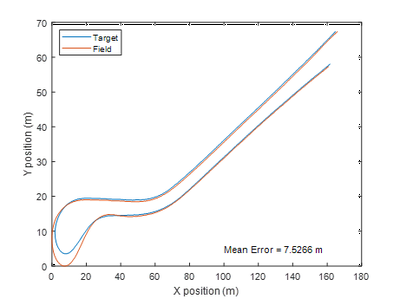
We proposed a piecewise PID control algorithm to control the vehicle speed of the CAV owned by CATS lab, USF. The performance is farily good. The speed profile is very smooth. The attached two figures illustrate the speed tracking performance and trajectory trakcing performance of our CAV. The testing site is at USF Rocky Road.
Xiaowei (Tom) Shi
Assistant Professor
My research interests include connected, automated, modular, electric vehicle technologies.